Σειρά ρομπότ συγκόλλησης



Ρομπότ συγκόλλησης

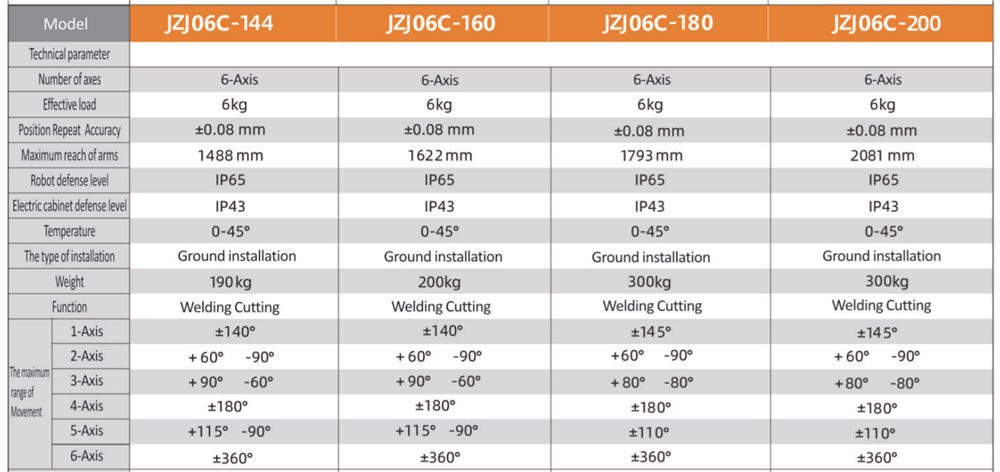
Συγκόλληση ρομπότ σειρά JZJ06C-180
Συγκόλληση ρομπότ σειρά JZJ06C-144

Συγκόλληση ρομπότ σειρά JZJ06C-160

Συγκόλληση ρομπότ σειρά JZJ06C-200
Σύντομη εισαγωγή
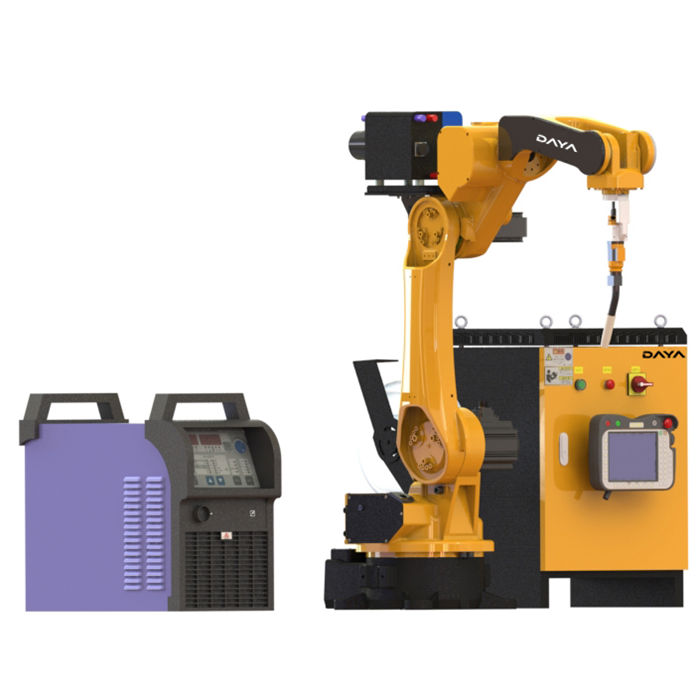
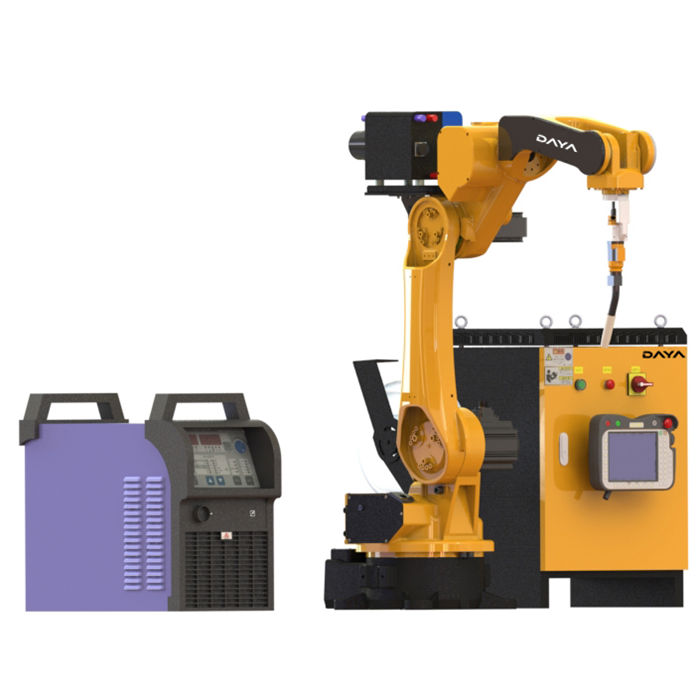
Το ρομπότ συγκόλλησης είναι ένα βιομηχανικό ρομπότ που ασχολείται με τη συγκόλληση (συμπεριλαμβανομένης της κοπής και του ψεκασμού). Σύμφωνα με τον ορισμό του διεθνούς οργανισμού τυποποίησης (ISO) ότι το βιομηχανικό ρομπότ ανήκει σε τυπικό ρομπότ συγκόλλησης, το βιομηχανικό ρομπότ είναι ένας πολλαπλών χρήσεων, επαναλαμβανόμενος προγραμματιζόμενος χειριστής με τρεις ή περισσότερους προγραμματιζόμενους άξονες, ο οποίος χρησιμοποιείται στον τομέα του βιομηχανικού αυτοματισμού. Προκειμένου να προσαρμοστεί σε διαφορετικές εφαρμογές, η μηχανική διεπαφή του τελευταίου άξονα του ρομπότ είναι συνήθως μια συνδετική φλάντζα, η οποία μπορεί να συνδεθεί με διαφορετικά εργαλεία ή τελικούς τελεστές. Το ρομπότ συγκόλλησης είναι να εγκαταστήσετε λαβίδες συγκόλλησης ή πιστόλι συγκόλλησης στην ακραία φλάντζα του βιομηχανικού ρομπότ, έτσι ώστε να μπορεί να πραγματοποιήσει συγκόλληση, κοπή ή θερμικό ψεκασμό.
Η συγκόλληση με ρομπότ είναι η χρήση μηχανοκίνητων προγραμματιζόμενων εργαλείων (ρομπότ), τα οποία αυτοματοποιούν πλήρως μια διαδικασία συγκόλλησης με την εκτέλεση της συγκόλλησης και με το χειρισμό του εξαρτήματος. Διαδικασίες όπως η συγκόλληση τόξου μετάλλου αερίου, ενώ συχνά αυτοματοποιούνται, δεν είναι απαραίτητα ισοδύναμες με τη συγκόλληση ρομπότ, καθώς ένας χειριστής ανθρώπου προετοιμάζει μερικές φορές τα υλικά που πρόκειται να συγκολληθούν. Η συγκόλληση ρομπότ χρησιμοποιείται συνήθως για συγκόλληση σημείου αντίστασης και συγκόλληση τόξου σε εφαρμογές υψηλής παραγωγής, όπως η αυτοκινητοβιομηχανία.
Η συγκόλληση ρομπότ είναι μια σχετικά νέα εφαρμογή της ρομποτικής, παρόλο που τα ρομπότ εισήχθησαν για πρώτη φορά στη βιομηχανία των ΗΠΑ κατά τη διάρκεια της δεκαετίας του 1960. Η χρήση ρομπότ στη συγκόλληση δεν ξεκίνησε μέχρι τη δεκαετία του 1980, όταν η αυτοκινητοβιομηχανία άρχισε να χρησιμοποιεί εκτενώς ρομπότ για συγκόλληση spot. Από τότε, τόσο ο αριθμός των ρομπότ που χρησιμοποιούνται στη βιομηχανία όσο και ο αριθμός των εφαρμογών τους έχει αυξηθεί πολύ. Το 2005, περισσότερα από 120.000 ρομπότ χρησιμοποιήθηκαν στη βιομηχανία της Βόρειας Αμερικής, περίπου τα μισά από αυτά για συγκόλληση. [1] Η ανάπτυξη περιορίζεται κυρίως από το υψηλό κόστος εξοπλισμού και τον προκύπτον περιορισμό σε εφαρμογές υψηλής παραγωγής.
Η συγκόλληση τόξου ρομπότ άρχισε να αναπτύσσεται γρήγορα μόλις πρόσφατα, και ήδη διοικεί περίπου το 20% των βιομηχανικών εφαρμογών ρομπότ. Τα κύρια συστατικά των ρομπότ συγκόλλησης τόξου είναι ο χειριστής ή η μηχανική μονάδα και ο ελεγκτής, ο οποίος λειτουργεί ως «εγκέφαλος» του ρομπότ. Ο χειριστής είναι αυτό που κάνει το ρομπότ να κινείται και ο σχεδιασμός αυτών των συστημάτων μπορεί να κατηγοριοποιηθεί σε διάφορους κοινούς τύπους, όπως το SCARA και το καρτεσιανό ρομπότ συντεταγμένων, τα οποία χρησιμοποιούν διαφορετικά συστήματα συντεταγμένων για να κατευθύνουν τους βραχίονες του μηχανήματος.
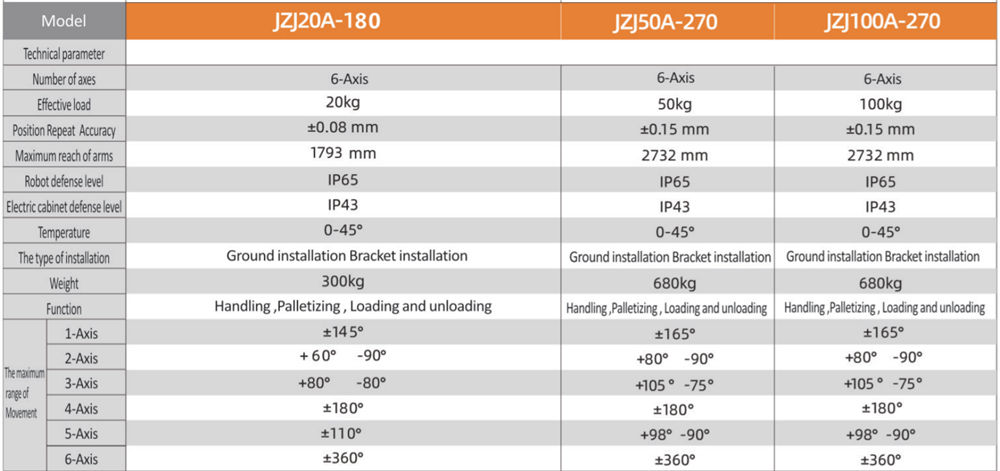
Τεχνικές παράμετροι σειράς ρομπότ συγκόλλησης